/*
Modern Robotics Analog Example
Created 7/25/2017 by Colton Mehlhoff of Modern Robotics using FTC SDK 3.10
Reuse permitted with credit where credit is due
The Modern Robotics Core Device Interface reads analog input
using a 10 bit value meaning the Android Phone reads a value from 0 to 1023.
The FTC SDK supplies a "voltage". The SDK is scaling this value of 0-1023 to 1-5 with decimal places.
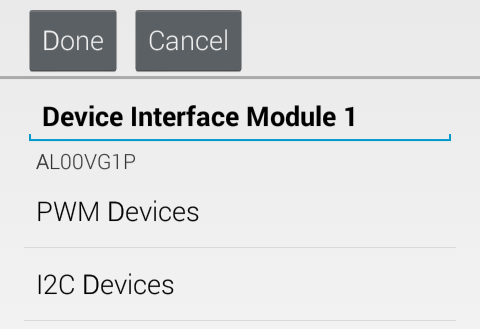
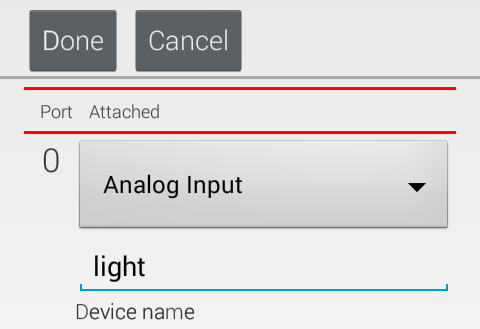
Configuration:
Analog Input on Core Device Interface "light"
Core Device Interface named "Device Interface Module 1"
Support is available by emailing support@modernroboticsinc.com
*/
package org.firstinspires.ftc.teamcode;
import com.qualcomm.robotcore.eventloop.opmode.LinearOpMode;
import com.qualcomm.robotcore.eventloop.opmode.TeleOp;
import com.qualcomm.robotcore.hardware.AnalogInput;
import com.qualcomm.robotcore.hardware.DeviceInterfaceModule;
@TeleOp(name = "Analog Example", group = "MRI")
//@Disabled
public class MRI_Analog_Example extends LinearOpMode {
//An Analog Input. In this example, we used a Light Sensor although it could be any analog sensor.
AnalogInput MRLightSensor;
//CDI. Using this, we can read any analog sensor on this CDI without creating an instance for each sensor.
DeviceInterfaceModule cdi;
@Override
public void runOpMode() {
telemetry.addData("Status", "Initialized");
telemetry.update();
//Link objects to configuration file
MRLightSensor = hardwareMap.analogInput.get("light");
cdi = hardwareMap.deviceInterfaceModule.get("Device Interface Module 1");
waitForStart();
while (opModeIsActive()) {
//Read the light sensor using the Analog Input object
telemetry.addData("light", MRLightSensor.getVoltage());
//Read each Analog Port of the CDI. 0-7
for (int i = 0; i < 8; i++) {
telemetry.addData("Analog " + i, cdi.getAnalogInputVoltage(i));
}
telemetry.update();
}
}
}