
HiTechnic NXT Touch Sensor Multiplexer
$14.95
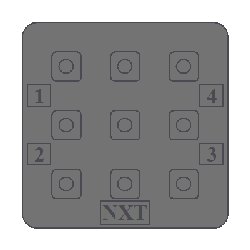
Connect up to 4 standard NXT Touch Sensors to one sensor port with the Touch Sensor Multiplexer. The HiTechnic Touch Sensor Multiplexer has 4 input ports where NXT Touch Sensors can be attached and a single output port to connect to the NXT. The state of each Touch Sensor can be read independently and a single read can determine the state of each touch sensor.
Out of stock
Description

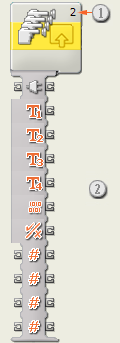
This chart shows the different characteristics of the plugs on the Touch MUX block’s data hub:
Plug | Data Type | Possible Range | What the Values Mean | |
| Port | Number | 1 – 4 | 1 = Port 1, 2 = Port 2, 3 = Port 3, 4 = Port 4 |
| Switch1 | Logic | True/False | True = Touch Sensor pressed |
| Switch2 | Logic | True/False | True = Touch Sensor pressed |
| Switch3 | Logic | True/False | True = Touch Sensor pressed |
| Switch4 | Logic | True/False | True = Touch Sensor pressed |
| Raw Value | Number | 0 – 15 | Raw (unscaled) value from the Touch MUX |
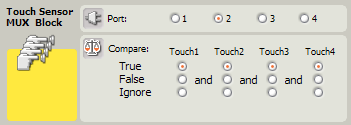
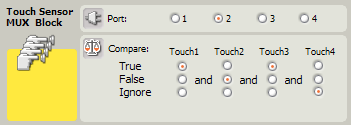
| Yes / No | Logic | True/False | Compare table result |
| Entry1 | Number | 0 – 2 | Switch 1 Compare entry |
| Entry2 | Number | 0 – 2 | Switch 2 Compare entry |
| Entry3 | Number | 0 – 2 | Switch 2 Compare entry |
| Entry4 | Number | 0 – 2 | Switch 2 Compare entry |
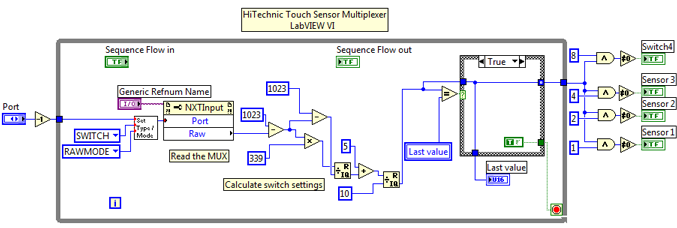
To decode the touch sensor status based on the raw sensor value, here is the code fragment:
SetSensorType(S1, SENSOR_TYPE_LIGHT); long value, switches; bool switch1,switch2,switch3,switch4; value=1023-SensorRaw(S1); switches=339*value; switches/=1023-value; switches+=5; switches/=10; if(switches&8) switch4=1; else switch4=0; if(switches&4) switch3=1; else switch3=0; if(switches&2) switch2=1; else switch2=0; if(switches&1) switch1=1; else switch1=0;
Additional information
| Weight | .0990 lbs |
|---|---|
| Dimensions | 3 × 4.5 × 1.5 in |
Robot C
The RobotC driver suite supports HiTechnic products for RobotC 4.x and RobotC 3.x. Select the corresponding repository at the link below and download the zip file.


