
HiTechnic NXT Angle Sensor
$26.95
Measure axle rotation position and rotation speed with the HiTechnic Angle Sensor. The Angle Sensor enables you to measure three rotation properties:
- Absolute Angle – the rotation position of a rotating axle from 0 – 359 degrees with 1 degree accuracy
- Accumulated angle – the accumulated number of degrees an axle has rotated
- Rotation Speed – the speed of the axle rotation in RPM (revolutions per minute)
With its very low friction mechanism, the HiTechnic Angle Sensor is ideal for building models where accurate measurement of rotation properties of an axle is key. Perfect for building a distance measuring wheel or a weather station wind vane.
Out of stock
Description

To connect the sensor via the multiplexer, click the right arrow symbol ![]() to display the port options.
to display the port options.
![]()
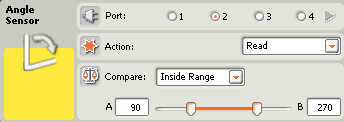
Click the checkbox to select that the sensor will be connected vial the MUX. Configure the MUX to Sensor connection by selecting the MUX port (1 – 4) that is connected to the sensor.
Click on the right arrow symbol again, ![]() to display the NXT to MUX port selection.
to display the NXT to MUX port selection.
![]()
Select the NXT port that is connected to the Sensor Multiplexer.

Additional information
| Weight | .0625 lbs |
|---|---|
| Dimensions | 2 × 3 × 1.25 in |
Robot C
The RobotC driver suite supports HiTechnic products for RobotC 4.x and RobotC 3.x. Select the corresponding repository at the link below and download the zip file.



