
HiTechnic NXT Force Sensor
$21.95
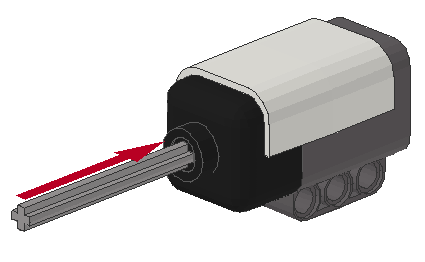
The NXT Force Sensor will enable you to build robots that can measure a physical force applied through a LEGO cross axle. The sensor has a LEGO cross axle receptacle and the value represents the force that is applied to an axle going into the sensor. Note that the force measured is the linear force going into the sensor.
This sensor can be thought of as an analog touch sensor. Unlike a touch sensor, which gives just a binary value indicating pressed or not-pressed, this sensor gives you a numeric value based on how hard the axle receptacle is pressed.
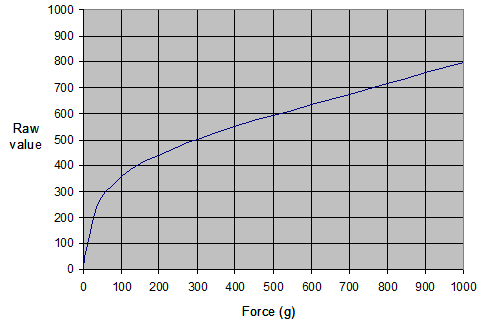
Note: The sensor value does not directly translate into force. With calibration, the value can be used to determine the approximate weight of an object. Build the sensor into your robot so that the weight of the object becomes a force pressing into the sensor. Now the sensor value can determine the weight of the object.
Ideal for use with the FTC 2012-2013 Ring It Up! challenge.
Out of stock
Description
Additional information
| Weight | .0495 lbs |
|---|
Robot C
The RobotC driver suite supports HiTechnic products for RobotC 4.x and RobotC 3.x. Select the corresponding repository at the link below and download the zip file.



