Shop

HiTechnic NXT PIR Sensor
$19.95
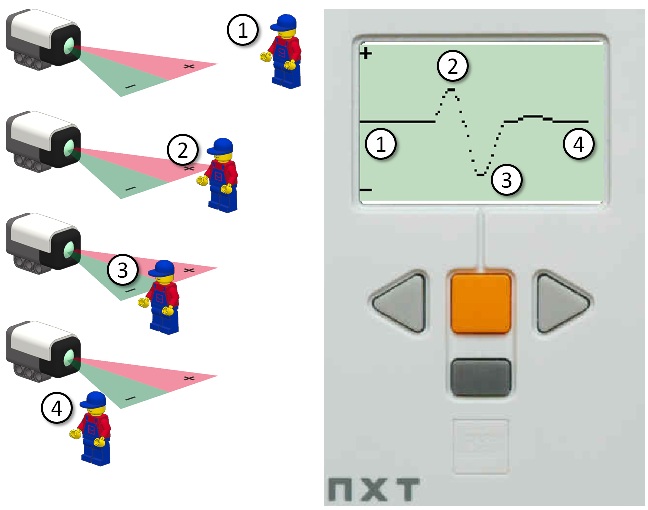
Detect people or pets with the HiTechnic PIR Sensor. This Passive Infrared Sensor is similar to the sensors used on security lights that turn on when people or animals move in front of them. The sensor value reflects a change in the infrared radiation received within the field of view. Use it as a motion sensor for an alarm system or to trigger a camera when an animal passes by. With some more advanced building and programming, the sensor can also be used to track the direction to a warm person, animal, or object.
Out of stock
Description




Additional information
| Weight | .0600 lbs |
|---|---|
| Dimensions | 2 × 3 × 1.25 in |
Robot C
The RobotC driver suite supports HiTechnic products for RobotC 4.x and RobotC 3.x. Select the corresponding repository at the link below and download the zip file.
Downloads
No downloads found!



